وصف المنتج
KSMIT3: نظام ذو رأس ومرجع في الموقف
KSMIT3 هو أحدث نظام لترتيب الرسم والمرجعية الذي يأتي كوحدة مستقلة وظيفية بالكامل. يعتمد تصميمه على عدد محدود من مكونات الأجهزة،مما يسهل دمجها في أي نظام.
يمتلك هذا النظام المبتكر بروتوكول اتصالات موثق بالكامل ومعايير الصناعة، والذي يسمح بتخصيص رسائل البيانات من حيث التردد وتنسيق الإخراج والبيانات.يتم معالجة الإشارة بالكامل على اللوحةهذه الميزة تجعل KSMIT3 مثالية للاستخدام في بيئات تشغيل MCU بسيطة.
يحتوي KSMIT3 على دقة عالية في ظل ظروف ديناميكية مع دقة الانقلاب والإلقاء من 1 درجة RMS ، بالإضافة إلى دقة الانحراف من 2 درجة RMS.مما يجعلها مثالية للاستخدام في التحكم والاستقرار لأي كائن أو ملاحةمثل الطائرات بدون طيار
الخصائص
● أداء كامل AHRS على وحدات 12.1 × 12.1 مم
● دقة الالتفاف / الالتفاف (الديناميكية) 1.0 درجة
● دقة التوجيه 2.0 درجة
● متطلبات منخفضة للغاية للمعالج الرئيسي
● واجهة موحدة لدورة حياة المنتج بأكملها
● طاقة منخفضة (45 ميغاوات عند 3.0 فولت)
● متوافق مع PLCC28 PCB (12.1 x 12.1 x 2.6 ملم)
المعلمات التقنية
| البند |
المعايير (القيم النموذجية) |
| الموقف الدقيق |
دقة الالتفاف (الديناميكية) |
2 درجة (rms) |
| دقة التدحرج / الطوق (الديناميكية) |
1 درجة (rms) |
| الجيروسكوبات |
مقياس كامل |
±2000°/s |
| استقرار التحيز أثناء التشغيل |
10 درجة في الساعة |
| غير خطية |
0.1% |
| تغير عامل المقياس |
0.05% |
| g-SENSITITY |
0.1°/s/g |
| كثافة الضوضاء |
0.01o/s/√Hz |
| عرض النطاق الترددي (-3dB) |
180 هرتز |
| أجهزة قياس التسارع |
مقياس كامل |
± 16 غرام |
| استقرار التحيز أثناء التشغيل |
0.1mg |
| غير خطية |
0.5٪ |
| تغير عامل المقياس |
0.05% |
| كثافة الضوضاء |
200 ميكروغرام/√ هرتز |
| عرض النطاق الترددي (-3dB) |
180 |
| مقياس المغناطيس |
مقياس كامل |
6غاوس |
| غير خطية |
0.1% |
| القرار |
120 أوغوس |
| الضوضاء (rms) |
50 أوغوس |
| واجهات |
فولتاج التزويد |
3.3v DC |
| الاتصال بالمنفذ التسلسلي |
TTL |
| تردد الخروج |
معدل 100 هرتز@230400 باود |
إطارات مرجعية
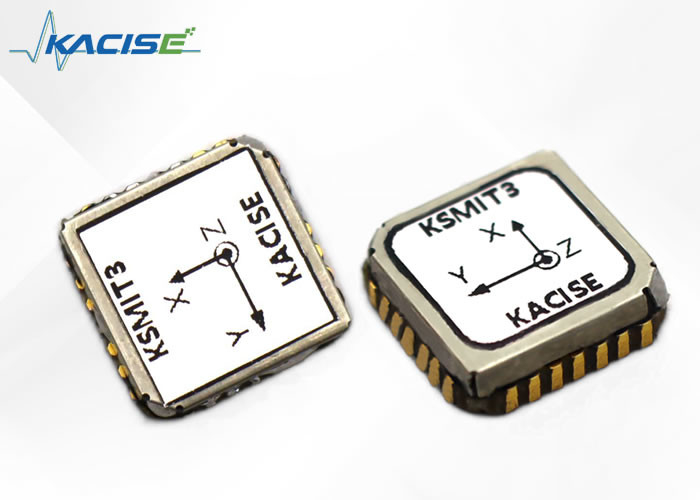
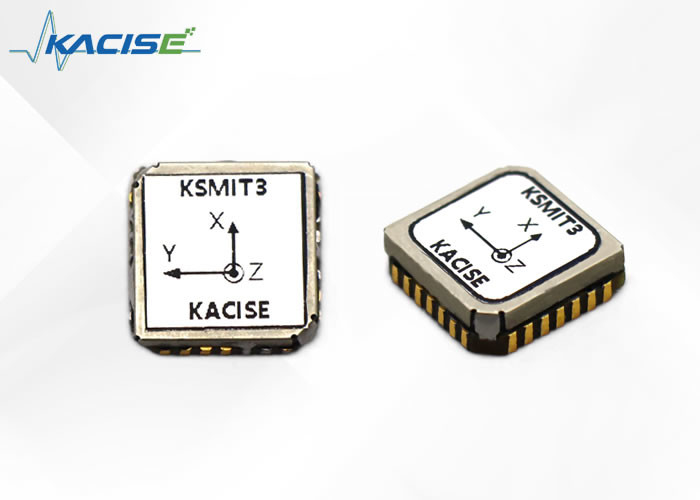
يستخدم KSMIT3 نظام إحداثيات يميني ويتم تعريف إطار جهاز الاستشعار الافتراضي كما هو موضح في الشكل 13. لمعرفة موقع مصدر إطار جهاز الاستشعار بدقة أكبر،الرجوع إلى دليل تكامل الأجهزةبعض مخرجات البيانات المستخدمة بشكل شائع مع نظام الإحداثيات المرجعي للخروج المدرجة في الشكل 1.
 الشكل 1 جهاز الاستشعار الافتراضي لنظام الإحداثيات الثابتة لوحدة KSMIT3
الشكل 1 جهاز الاستشعار الافتراضي لنظام الإحداثيات الثابتة لوحدة KSMIT3
بروتوكول اتصال المستخدم
معدل البود هو 115200bps و 230400bps و 460800bps. بيانات بيت 8 ، توقف بيت 1 ، لا تفتيش بيت. البايتات العالية تأتي أولاً والبايتات المنخفضة تأتي أخيراً. تردد تحديث البيانات f=100Hz.معدل البود الافتراضي هو 230400bps.
| عدد البايتات |
الاسم |
نوع البايت |
ضخمة-كتيون |
النطاق |
غيرإيه تي |
الوصف |
| 1 ~ 2 |
رأس الإطار |
(أو)2 |
|
|
|
0XAA 71 |
| 3 |
رقم شكل الإطار |
القيمة الثابتة 3=0x03 |
| 4 |
طول إطار الاتصال |
القيمة الثابتة 100=0x64 |
| 5~13 |
الـ (جيرو) |
S3*3 |
1e-4 |
±8388608 |
°/s |
X/Y/Z يمين/جبهة/أعلى |
| 14 ~ 22 |
(بالتأكيد) |
S3*3 |
1e-5 |
±83.88608 |
g |
X/Y/Z يمين/جبهة/أعلى |
| 23~28 |
ماغن |
S3*2 |
1e-2 |
± 32768 |
UT |
X/Y/Z يمين/جبهة/أعلى |
| 29~31 |
هبار |
S1*3 |
1e-2 |
±8388608 |
مبار |
البارومتر |
| 32 |
العلم |
(أو)1 |
|
|
|
BIT1 - علامة مغناطيسية صالحة 1- صالحة
المعيار الثنائي المقياس البيرومتري الصالح 1- الصالح
BIT3- GPS_exist
معلومات نظام تحديد المواقع الخروج أو لا
0- لا توجد معلومات عن نظام تحديد المواقع
1- معلومات GPS متاحة
معلومات BIT4-GPS علامة صالحة 1- صالحة
BIT5-8 ملء صفر
|
| 33~40 |
الكلمات المحجوزة للنظام |
|
|
|
|
|
| 41~49 |
GPS_Vele/N/U |
S3*3 |
1e-4 |
±8388608 |
م/س |
نظام تحديد المواقع (GPS) شرق/شمال/سرعة السماء |
| 50~60 |
GPS_Lon/Lan |
S2*4 |
1e-7 |
± 214.7483648 |
° |
GPS LongITude/GPS LatITude |
| GPS_Hmsl |
S1*3 |
1e-2 |
±8388608 |
م |
GPS AltITude |
| 61~62 |
نظام تحديد المواقع |
S1*2 |
1e-2 8 |
± 3276 |
° |
توجيه GPS |
| 63 |
GPS_Status |
(أو)1 |
|
|
|
BIT1~4-عدد أقمار الاصطناعية الموضحة بواسطة نظام تحديد المواقع (حد أقصى 15)
BIT5 - علامة تحديد المواقع GPS 1 صالحة
BIT6~8- نوع تحديد موقع نظام تحديد المواقع GPS
نظام تحديد المواقع
0x00=لا إصلاح
0x01=ميت حساب فقط
0x02=2d إصلاح
0x03=3d-Fix
0x04=Gnss+ميت الاستقبال مجتمعة
0x05=الوقت فقط إصلاح
|
| 64~65 |
GPS_Pdop |
(أو)2 |
1e-2 |
|
|
|
| 66~71 |
(إنس_ات) |
S2*2 |
1e-2 |
± 32768 |
° |
التأرجح ±90° التدحرج ±180° |
| S1*2 |
655.36 |
° |
الارتداد ± 180 درجة |
| 72~80 |
Vn |
S3*3 |
1e-4 |
±8388608 |
م/س |
Vel_E/N/U |
| 81~89 |
إضافة |
S2*4 |
1e-7 |
± 214.7483648 |
° |
الطول/ العرض |
| S1*3 |
1e-2 |
±8388608 |
م |
AltITude |
| 92 |
الوسائل والسيناريوهات |
(أو)1 |
|
|
|
BIT1~4- وضع العمل
الموازنة = 1 ، الإنس = 2 ، Ahrs = 3 ، Vg = 4
BIT5~8- سيناريو العمل
1=على متن الطائرة ؛2=في الداخل ؛3=على متن الطائرة 4=الجناح الثابت؛5=الدوار
|
| 93~96 |
الاحتياطي |
|
|
|
|
صفر ملء |
| 97~98 |
الحرارة |
S،2 |
1e-2 |
± 32768 |
°C |
|
| 99 |
العد |
(أو)1 |
|
|
|
|
| 100 |
رمز التحقق |
|
|
|
|
جمع جميع الحروف قبل التحقق من BIT |
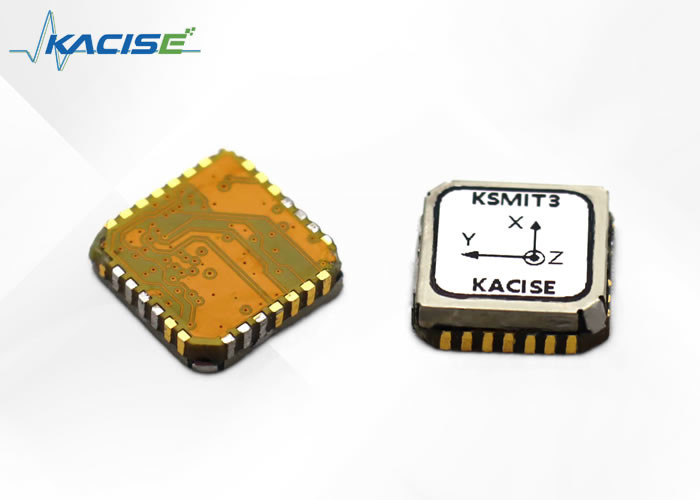
تكوين الدبوس
الشكل 2: تكوين دبوس وحدة KSMIT3 (المنظر العلوي)
| رقم |
الاسم |
النوع |
الوصف |
| 7 |
VDDIO |
القوة |
الجهد الإمدادي الرقمي |
| 8 |
الـ GND |
| 23 |
UART_RX |
واجهة UART |
إدخال بيانات المستقبل |
| 24 |
UART_TX |
واجهة UART |
مخرج بيانات جهاز الإرسال |
| 25 |
الـ GND |
| 18 |
AUX_RX A |
واجهة GNSS المساعدة |
إدخال بيانات المستقبل من وحدة GNSS |
| 19 |
UX_TX |
واجهة GNSS المساعدة |
مخرج بيانات جهاز الإرسال إلى وحدة GNSS |
| 20 |
SYNC_PPS |
واجهة GNSS المساعدة |
النبضات في الثانية المدخلة من وحدة GNSS |
إعدادات المعلمات
المنتج افتراضي إلى حالة "المخرج المستمر" عند تشغيله، ولتعيين المعلمات، يجب إرسال أمر "وقف المخرج" أولا.يجب على المستخدم تشغيل وإعادة تشغيل لتحويل تلقائي إلى حالة النقل المستمر.
1 توقف الخروج
إيقاف الإخراج هو تغيير حالة "الإخراج المستمر" الافتراضية على الطاقة إلى حالة "إعداد المعلمات".
أرسلت إلى: * PA الفضاء GS01 الفضاء STOP العودة العربة
الإجابة:
* مساحة PA مساحة GS01 مساحة STOP مساحة 0 عودة العربة فشلت
مساحة (إيه بي) مساحة (جي إس 01) مساحة (ستوب) مساحة (أول) العودة الناجحة
2 إعداد سيناريوهات العمل
يحتاج المنتج إلى تغيير معايير المرشح وفقًا لسيناريوهات التطبيق المختلفة. تشمل سيناريوهات العمل السيارة المثبتة، الداخلية (طاولة المذبذب) السفينة، الجناح الثابت، الدوار،مع السيناريو الافتراضي على متن الطائرة.
تغيير المشهد هو تغيير "مشهد السيارة" الافتراضي عند تشغيله إلى المشهد الفعلي.
إرسال: * الفضاء PA GS01 الفضاء مشاهد الفضاء 1 العودة العربة
الإجابة:
* مساحة PA مساحة GS01 مساحة SCENES مساحة 1 مساحة 0 عودة العربة فشلت
* فضاء PA فضاء GS01 فضاء SCENES فضاء 1 فضاء 1 العودة عربة ناجحة
الملاحظة: الحروف الموضحة تشمل 1 سيارة مثبتة، 2 داخلية، 3 سفينة مثبتة، 4 جناح ثابت، و 5 الدوار اختياري.
3 حدد معدل البود
معدل البود الافتراضي للعمل هو 230400bps، والذي يمكن تحويله بإرسال الأوامر.
إرسال: * PA الفضاء GS01 الفضاء BAUD الفضاء 1 العودة العربة
الإجابة:
* مساحة PA مساحة GS01 مساحة BAUD مساحة 1 مساحة 0 عودة العربة فشلت
* فضاء PA فضاء GS01 فضاء BAUD فضاء 1 فضاء 1 العودة عربة ناجحة
ملاحظة: محتوى الأحرف الموضحة هي 1-115200bps و 2-230400bps و 3-460800bps ، وهي اختيارية.
4 استعادة إعدادات المصنع
إن استعادة إعدادات المصنع تتضمن تعيين مشهد العمل وتنسيق الإطار ومعدل البود والانحدار المغناطيسي ومعايرة المجال المغناطيسي إلى القيم الافتراضية.
إرسال: * PA الفضاء GS01 الفضاء إعادة تعيين العودة عربة
الإجابة:
* مساحة PA مساحة GS01 مساحة RESET مساحة 0 عودة العربة فشلت
* فضاء PA فضاء GS01 فضاء RESET فضاء 1 عودة العربة ناجحة
5 حدد زاوية الانحدار المغناطيسي
الانحدار المغناطيسي الافتراضي هو 0، مع مغناطيسي إيجابي شمال شرق و مغناطيسي سلبي غرب.
إرسال: * PA الفضاء GS01 الفضاء MDEC الفضاء +/- XX.XX العودة العربة
الإجابة:
* مساحة PA مساحة GS01 مساحة MDEC مساحة 0 عودة العربة فشلت
* فضاء PA فضاء GS01 فضاء MDEC فضاء 1 عودة العربة ناجحة
ملاحظة: إذا كانت زاوية الانحدار المغناطيسي هي -2.5 درجة، فإن سلسلة التوضيح هي -02.50إذا كانت زاوية الانحدار المغناطيسي + 1.5 درجة ، فإن سلسلة التوضيح هي + 01.50.
6 معايرة المجال المغناطيسي
في تشغيل أجهزة الاستشعار المغناطيسية، لا مفر من أن تتأثر تكنولوجيا المعلومات بالتداخلات من الحقول الكهرومغناطيسية المحيطة،والتي يمكن أن تؤدي إلى درجات مختلفة من الانحراف والتشوه من قوة المجال المغناطيسي محور XYZ المقاسة بواسطة جهاز الاستشعار المغناطيسيمعايرة المجال المغناطيسي هي تعويض التداخلات المغناطيسية الناعمة والقاسية من خلال تعلم الخوارزميات للبيئة المحيطة بالمجال المغناطيسي.نوصي بشدة بأن يتم تنفيذ معايرة المجال المغناطيسي بعد كل تثبيت وبعد تغييرات في بيئة المجال المغناطيسي.
عند إجراء معايرة المجال المغناطيسي، يجب أن تبقى المواد المتداخلة المحيطة دون تغيير (أيتدور مع المنتج) خلال عملية تدوير المنتجالتعديل يتطلب من المشغل عدم امتلاك هواتف محمولة أو بطاقات مغناطيسية أو مفاتيح أو أجهزة معدنية أو تعمل بالطاقة يمكن أن تؤثر على المجال الكهرومغناطيسي على جسده.
انتباه: فقط في نطاق التداخل المحدود يمكن لعملية معايرة المجال المغناطيسي أن يكون لها تأثير تعويضي.نطاق المستشعر المغناطيسي هو ما يقرب من بين زائد و ناقص 1 غاوس، وهو ما يقرب من ضعف الحقل المغناطيسي الأرضي في نصف الكرة الشمالي. إذا تجاوزت قيمة تداخل الحقل المغناطيسي زائد أو ناقص 0.5 غاوس ، فقد يصل مقياس المغناطيس إلى حالة التشبع ،الذي يعيق تأثير التعويضعندما يفشل المعايرة، يُشير تقنية المعلومات إلى أن المشكلة قد حدثت.
معايرة ثنائية الأبعاد
ملاحظة: عندما لا يمكن أن يدور المنتج في 3D ، يمكن استخدام المعايرة 2D. يوصى أن تكون زاوية الانحناء الفعلية للمنتج أقل من 5 درجات.يمكن إكمال المعايرة ثنائية الأبعاد من خلال واجهة أو منفذ متسلسل عن طريق إصدار الأوامر.
1. بدء المعايرة: قبل معايرة المستخدم، إرسال
إرسال: * فضاء PA فضاء GS01 فضاء MCAL فضاء START العودة عربة
الإجابة:
* مساحة PA مساحة GS01 مساحة MCAL مساحة START مساحة 0 عودة العربة فشلت
مساحة (باي) مساحة (جي إس 01) مساحة (إم سي إيه إل) مساحة (ستارت) مساحة 1 العودة
2 توقف المعايرة: بدء الدوران الأفقي لأكثر من 2 دورة، وإرسال بعد الانتهاء
إرسال: * PA الفضاء GS01 الفضاء MCAL الفضاء نهاية العودة عربة
الإجابة:
* مساحة PA مساحة GS01 مساحة MCAL مساحة 0 عودة العربة فشلت
* مساحة PA مساحة GS01 مساحة MCAL مساحة 1 مساحة X: x.xx مساحة Y: y.yy عودة العربة ناجحة
ملاحظة: تعود نتائج المعايرة من 0.90-1 تشير إلى نتائج معايرة جيدة، في حين أن >1.1 أو <0.9 تشير إلى نتائج معايرة سيئة.
3. حفظ نتائج المعايرة: بعد معايرة المستخدم، قرر ما إذا كان سيتم حفظ على أساس نتائج المعايرة.
إرسال: * فضاء PA فضاء GS01 فضاء MCAL فضاء SAVE العودة عربة
الإجابة:
* مساحة PA مساحة GS01 مساحة MCAL مساحة SAVE مساحة 0 العودة عربة فشلت
* فضاء PA فضاء GS01 فضاء MCAL فضاء SAVE فضاء 1 العودة عربة ناجحة
4نتائج المعايرة الواضحة: بعد المعايرة، يقرر المستخدم ما إذا كان سيتم مسحها بناءً على نتائج المعايرة.
إرسال: * فضاء PA فضاء GS01 فضاء MCAL فضاء
الإجابة:
* مساحة PA مساحة GS01 مساحة MCAL مساحة CLEAR مساحة 0 عودة العربة فشلت
* فضاء PA فضاء GS01 فضاء MCAL فضاء CLEAR فضاء 1 العودة عربة ناجحة
أالتطبيقات
المركبات الجوية الصغيرة
• الطائرات بدون طيار
• طائرات بدون طيار مصورة
• الطائرات بدون طيار الزراعية
الآلات
• القمر الصناعي في حالة تحرك (SotM)
• آلات البناء
• مراقبة السفن
الروبوتات
• الزراعة المستقلة
• أتمتة المستودعات
• أذرع الروبوت
التطبيقات الأخرى
• أجهزة محمولة
• ملاحة المشاة
• VR/AR و HMDs
• مساعدة الملاحة
الدعم والخدمات:
مرحباً بكم في الدعم التقني والخدمات الخاصة بمستشعر الجيروسكوب فريقنا المخصص هنا لمساعدتكم في أي مشاكل تقنية أو استفسارات قد تكون لديكم فيما يتعلق باستخدامهاأو صيانة مستشعر الجيروسكوب الخاص بكنحن ملتزمون بتوفير أفضل دعم ممكن لضمان أن يعمل منتجك بشكل مثالي.
يتضمن دعمنا وثائق المنتج المفصلة، والأسئلة الشائعة، ودلائل لإصلاح الأخطاء المصممة لمساعدتك على حل المشكلات الشائعة بسرعة.لأسباب معقدة أو محددةفريق الدعم الفني لدينا مستعد لتقديم المساعدة الشخصية.
إذا كنت بحاجة إلى مزيد من المساعدة، please refer to the 'Contact Us' section of our website (contact information excluded as per request) where you can find additional resources and support channels to get in touch with our professional technical support team.
شكراً لاختيارك لمستشعر الجيروسكوب الإلكتروني لدينا نتطلع إلى خدمتك وضمان نجاح مشاريعك
التعبئة والشحن:
يتم تعبئة مستشعر الجيروسكوب الإلكتروني بعناية في كيس مضاد للستاتيك لضمان الحماية من الإفراج الكهربائي (ESD). ثم يتم تغطية المستشعر بشكل آمن في ملابس مخصصة ،عفن الرغوة عالي الكثافة، والذي يوفر امتصاص الصدمات متفوقة أثناء النقل.صندوق بطاقات العلامة التجارية الذي يحمي جهاز الاستشعار من العوامل البيئية والأضرار المحتملة أثناء النقل.
خارج الصندوق يحتوي على علامة واضحة مع اسم المنتج، تعليمات التعامل، وبرمجة شريطية للتتبع السهل.تقدم طبقة إضافية من الأمن.
في حالة الشحن، يتم إرسال جهاز الاستشعار الإلكتروني عبر خدمة خدمة موثوقة لضمان التسليم في الوقت المناسب وآمن.توفير راحة البال والحماية للاستثمار الخاص بكيتم توفير معلومات التتبع بمجرد إرسال الطرد، مما يسمح بمراقبة الشحنة في الوقت الحقيقي حتى تصل إلى وجهتها.

 يجب أن تكون رسالتك بين 20-3000 حرف!
يجب أن تكون رسالتك بين 20-3000 حرف! english
english
 français
français
 Deutsch
Deutsch
 Italiano
Italiano
 Русский
Русский
 Español
Español
 português
português
 Nederlandse
Nederlandse
 ελληνικά
ελληνικά
 日本語
日本語
 한국
한국
 العربية
العربية
 हिन्दी
हिन्दी
 Türkçe
Türkçe
 indonesia
indonesia
 tiếng Việt
tiếng Việt
 ไทย
ไทย
 বাংলা
বাংলা
 فارسی
فارسی
 polski
polski